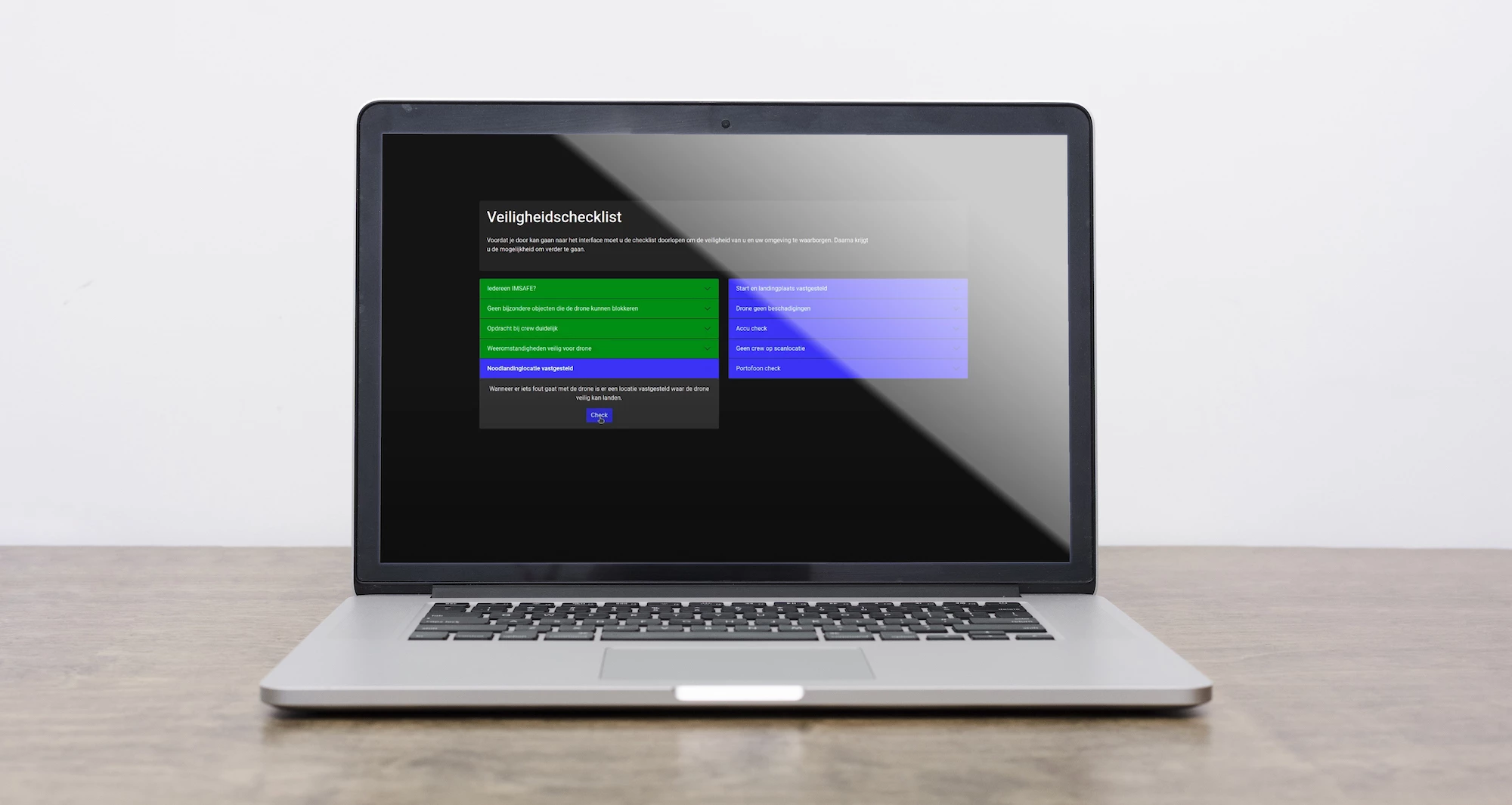
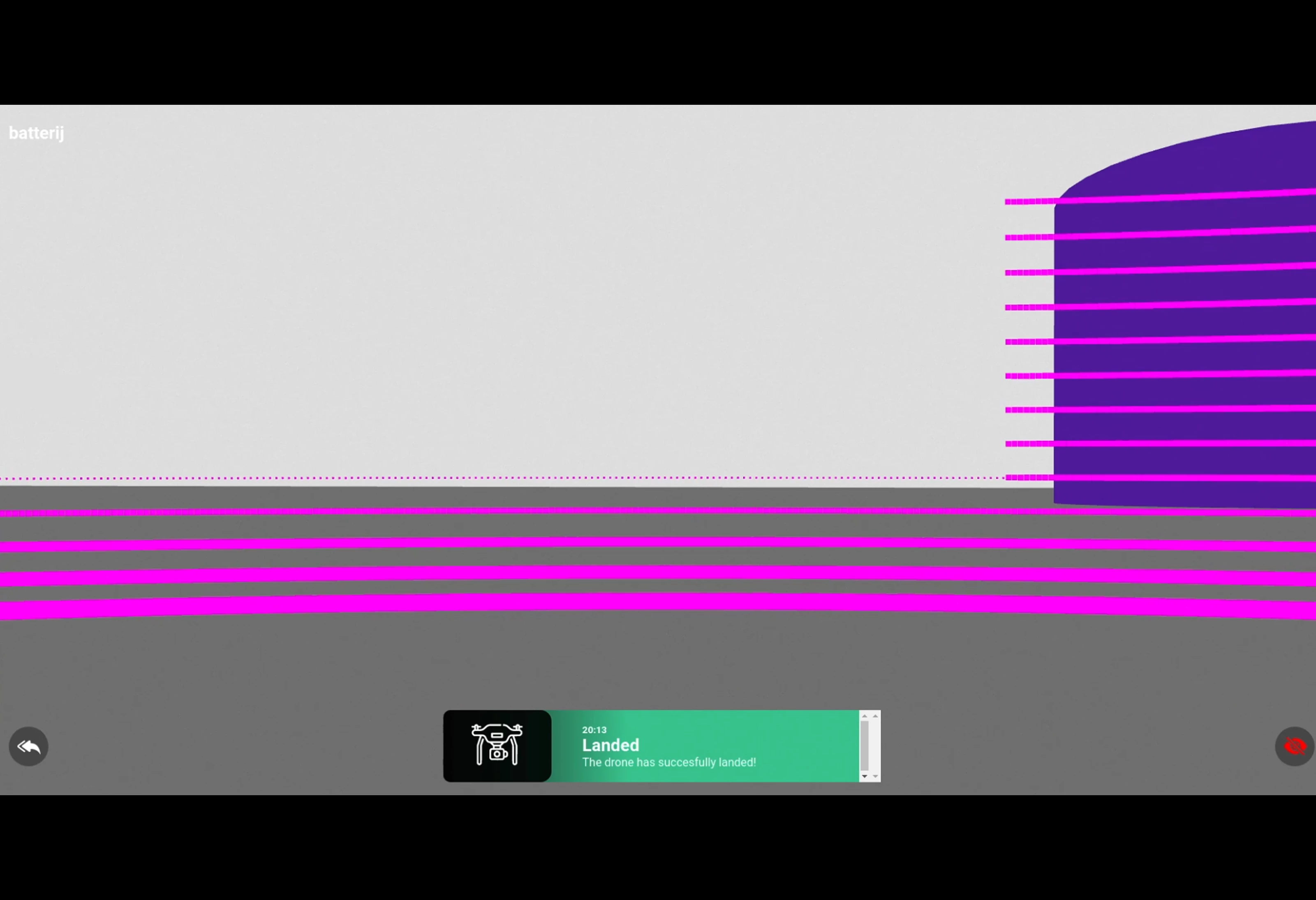
Realtime drone data visualisatie
Desktop-applicatie met een realtime verbinding met drone (ROS) ingebouwd in Electron.JS
In opdracht van DoBots werkte een groep studenten van CMGT 6 maanden aan een project, waarin de studeten werkten aan de ontwerpuitdaging: "Hoe kunnen we sensorinformatie van robots transparant maken voor robotbeheerders door middel van technologie?" Intern hebben zij gewerkt met Agile-Scrum methodiek en een design sprint gestart volgens het principe van 'Frame Your Design Challenge'. Na vele interviews met de doelgroep en design sprints kwamen de studenten op een concept dat bedoeld is om dronepiloten te helpen valideren of de sensordata overeenkomt met de camerastream. Dit zou het proces van een 3D-mapping van een omgeving of object kunnen versnellen waar het momenteel niet snel en intuïtief is met fotogrammetrie (fotogrammetrie is een methode om vorm en locatie van objecten en gebieden door metingen in foto's te bepalen).